- トップ
- 静岡市産学交流センター
- 産学連携事業
- 地域課題に係る産学共同研究委託事業
- 令和7年度 進捗状況 大日工業株式会社
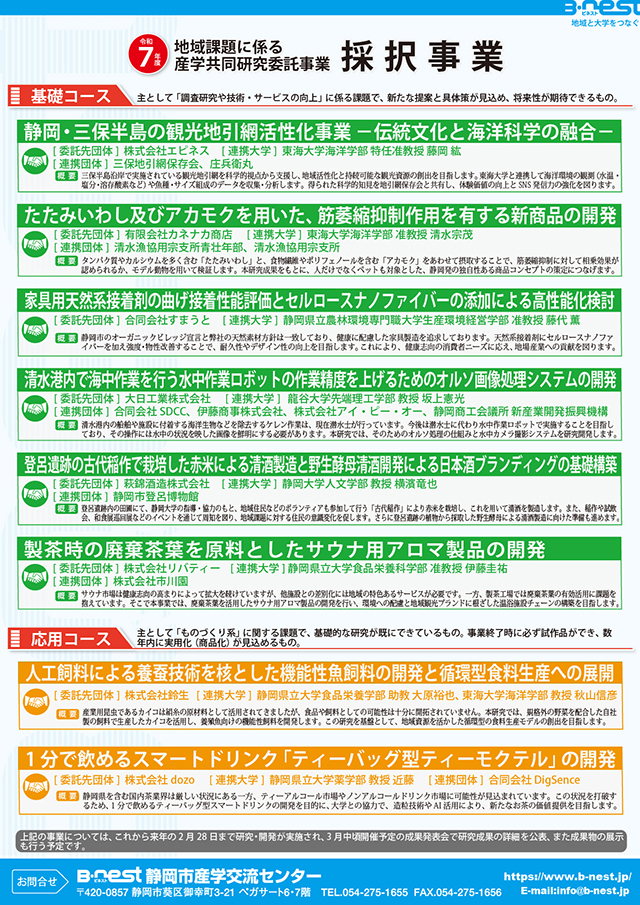
地域課題に係る産学共同研究委託事業
基礎コース
清水港内で海中作業を行う水中作業ロボットの作業精度を上げるためのオルソ画像処理システムの開発
[委託先団体] 大日工業株式会社
[連携大学] 龍谷大学先端理工学部 教授 坂上憲光
[連携団体] 合同会社SDCC、伊藤商事株式会社、株式会社アイ・ピー・オー、静岡商工会議所 新産業開発振興機構
目的
清水港内で実施されている、船舶や施設に付着した海洋生物等を除去するケレン作業は、現在潜水士が担っています。潜水士作業の代替として水中作業ロボット(Remotely Operated Vehicle:以降ROV)の活用が期待されていますが、そのためには、水中映像の視認性・鮮明度の向上が課題になっています。
本研究では、ROVに搭載する水中カメラのデモ機を製作し、実際に海中映像を取得したうえで、画像をオルソ化することで、海中状況を地上モニターで正確に確認できる仕組みを確立することを目的とします。これにより、ROVが潜水士の作業を補助し、安全性向上と効率化に資することを目指します。
進捗状況
ROVに設置するカメラのデモ機を、大日工業株式会社・興津ラボにて製作し、画像取得の動作確認を実施しました。ラズベリーパイ4にラズベリーカメラ2基を接続し、取得した画像情報を電・光コンバータで光信号へ変換、100m光ファイバを通して送信後、再び光・電コンバータで電気信号に戻しPCに入力する構成としました。

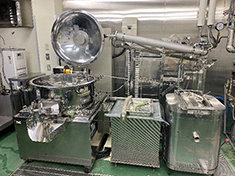
[写真1:カメラシステム]

[写真2:撮影の模様]

[写真3:取得された映像]
カメラ2基を長さ1.5mの角材に適切な間隔で固定(写真1)した後、移動式実験台の端に水平設置し、校正用格子パターンおよび金尺(1m)を貼り付けた壁面を撮影しました。カメラ間隔60または80cm、壁からの距離1または2mの複数条件で比較した結果、カメラ間隔80cmがROV搭載時の最適条件であることがわかりました(写真2・3)。現在、撮影画像の3Dオルソ画像化を検討中です。
今後の予定
カメラシステムをSUS製ケースに収納しROVに搭載するための設計を進めています。水深30mの水圧に耐えられるケース内にラズベリーパイ4(2台)含む電子部品を固定し、光ケーブル・電源線・ROV用テザーケーブルを束ねて地上にまで延長する構造とします。この構成により、水中画像をリアルタイムで地上モニターへ伝送できる見込みです。
また、3Dオルソ画像化については、実際に水中で取得した映像データを用いて解析します。これにより、潜水士が海中で確認・判断すべき状況をROVが撮影した映像から地上で把握できるようになり、作業効率・安全性の向上につながることが期待されます。







.jpg)










- トップ
- 静岡市産学交流センター
- 産学連携事業
- 地域課題に係る産学共同研究委託事業
- 令和7年度 進捗状況 大日工業株式会社